Przewody do serw
Przewody do serw
Serwomechanizmy to proste lub zaawansowane zamknięte układy mechaniki i sterowania. W najprostszym modelu schematycznym składają się głównie z korektorów, przetworników i silników. A jak wyglądają przewody do serw? Jakie są rodzaje kabli do serwomechanizmów?
Kable do serwomechanizmów – podstawowe rodzaje
Serwa muszą być ze sobą odpowiednio połączone. W tym celu nie można jednak zastosować dowolnego kabla. Potrzebny jest specjalny przewód do serw.
Ze względu na kryterium funkcjonalne kable do serw dzieli się m.in. na przewody rozgałęziające do serw, przedłużacze do serw i adaptery zasilania serwomechanizmów. Pierwsze i drugie najczęściej występują w formie skręcanej. Wynika to z konieczności zapewnienia jak największego bezpieczeństwa i wytrzymałości tego typu przewodów.
Przewody do serw znajdziesz w ofercie sklepu Botland.
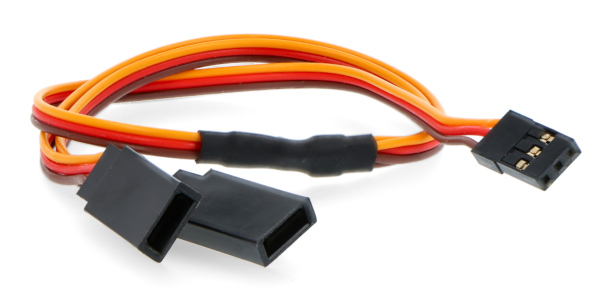
Pierwszy rodzaj, czyli przewody rozgałęziające, umożliwia podłączenie kilku serw, najczęściej dwóch, do jednego sterownika. Każdy kabel tego typu zwiększa więc możliwości rozbudowania danego układu mechanicznego lub automatycznego.
Z kolei przedłużacze do serw, także w zdecydowanej większości przypadków ze skręconymi przewodami, to kable zakończone standardowymi wtyczkami do serwomechanizmów. Jak sama nazwa wskazuje, przedłużacze do serw wykorzystywane są w celu zapewnienia połączeniu pożądanej długości, co przydaje się bardzo często zwłaszcza przy bardziej zaawansowanych konstrukcjach.
Ostatni wariant obejmuje adaptery zasilania do serwomechanizmów. Takie urządzenia umożliwiają zasilanie serwa poprzez baterię lub akumulator. Najczęściej mają końcówki typu JST i są trzypinowe.
Co trzeba wiedzieć o serwomechanizmie?
Wyróżnia się trzy główne grupy serwomechanizmów – micro-serwa, mini-serwa i wersje standardowe. W zakresie elektroniki programowalnej bardzo popularne są dwa pierwsze warianty, ponieważ charakteryzują się one zmniejszonymi rozmiarami. Taka cecha staje się dużym ułatwieniem w przypadku konstruowania niewielkich projektów mechanicznych. Serwomechanizm to nieodłączny podzespół mechaniczny, który stosuje się w przypadku tworzenia modeli zdalnie sterowanych i innych urządzeń automatycznych. Podzespół współpracuje bezpośrednio ze sterownikiem danej konstrukcji. Inną charakterystyczną cechą serwomechanizmów jest siłownik, który wnosi nieliniowość, a jednocześnie jest regulowanym członem całkującym.